
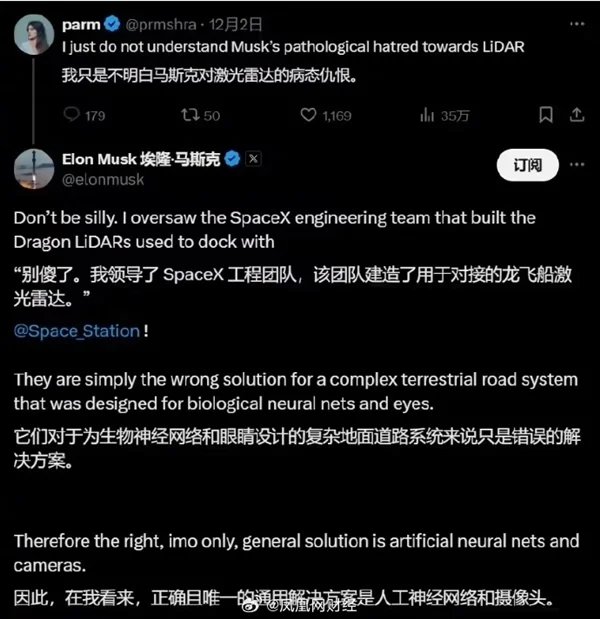
12月4日消息,近日,特斯拉CEO馬斯克近期再次公開批評激光雷達,稱其為“錯誤的解決方案”,又一次引起了網友的熱議。
馬斯克重申了其一貫的觀點:在復雜的道路駕駛環境中,模擬生物神經網絡和眼睛的視覺系統,才是最為有效的方式。
雖然馬斯克堅持視覺方案,但與特斯拉的“純視覺”路線不同,國內多數汽車制造商和供應商采用的是融合感知方案。
這種方案結合了激光雷達、攝像頭、毫米波雷達等多種傳感器,旨在增強系統的冗余性和感知能力。
盡管如此,馬斯克依然認為,激光雷達和雷達與視覺結合所帶來的“感知不一致性”使得這些技術無法達到理想的效果。
之前,長安汽車執行副總裁張曉宇表示,特斯拉FSD和華為的智駕系統各有優劣,但從長遠來看華為的智駕系統更有機會超越人類的駕駛水平。
在張曉宇看來,華為選擇激光雷達,加上不同傳感器的這種組合方案,可以實現全環境的感知能力,這種智駕更安全,上限會更高。
“純視覺的這種方案,他的算法是比較被動的,比如說被動依賴環境光的視覺方案,尤其在一些惡劣天氣,大雨暴雨濃霧或者黑夜相關場景下感知能力是不足,會對智駕的安全性帶來挑戰。“張曉宇說道。
當然了,之所以華為智能駕駛有這個實力,在張曉宇看來,當前華為的算力更大,智能化體驗在行業里還是是數一數二的存在。

【來源:快科技】





