
隨著全球智能制造與人工智能技術的持續進步,機器人靈巧手作為新型末端執行器,正逐步成為自動化生產、醫療康復等領域的關鍵設備之一。靈巧手以模擬人類手部結構與功能為核心,能夠完成抓取、裝配等高精度、高靈活度的復雜操作,不僅在工業生產中應用廣泛,更在服務機器人和醫療康復領域展現出強大潛力。

自20世紀70年代起,全球各大高校與研究機構便對靈巧手展開了深入研究,從最早的三指靈巧手到如今高度仿真的五指結構,技術的演進在驅動系統、傳動技術和傳感能力上均取得了顯著突破。特別是在20世紀末,隨著嵌入式硬件的發展,多指靈巧手邁入了高度集成和精細感知的新階段。然而,傳統多指靈巧手在面臨高制造成本、復雜結構設計以及較高維護成本的情況下,其實際應用受到了一定限制。為了應對這些挑戰,近年來靈巧手的設計逐漸朝著輕量化、模塊化、魯棒性和低成本方向發展,推動了技術的進一步普及。
核心技術解析:
靈巧手的核心技術可以歸納為驅動、傳動和傳感系統的協同工作:
驅動系統:為靈巧手提供動力來源。驅動類型可分為電機驅動、氣壓驅動、液壓驅動和形狀記憶合金驅動,其中電機驅動憑借其高效、低噪聲和易于控制的特性成為市場主流。
傳動系統:決定了靈巧手的運動精度和響應速度。常見的傳動方式包括腱繩傳動、齒輪驅動和連桿驅動。腱繩傳動結構簡單,但精度和抓取力有限;齒輪驅動具有較高的控制精度和抓取力,然而結構較為復雜且成本偏高;連桿驅動在抓取大物體時表現出色,但在遠距離控制和小空間操作中存在限制。
傳感系統:為靈巧手操作過程提供實時反饋。通過力傳感器和觸覺傳感器,靈巧手能夠實時感知環境變化和物體特性,并進行精準的抓取和操作,提升了靈巧手的靈活性和自適應能力。
靈巧手的“靈巧”程度在很大程度上取決于其自由度和執行器設計。隨著多自由度的逐漸普及,靈巧手已能夠完成更加復雜的任務,例如模擬人手進行精細操作。通過優化傳動與感知技術,現代靈巧手逐漸接近甚至超越人手的功能,使其在微操作與復雜環境中更具優勢。此外,內置微型驅動器的應用推動了靈巧手向結構緊湊化與性能穩定化的方向發展,為未來便攜性和高集成度設計提供了新的可能性。例如,兆威機電最新推出的靈巧手整手具備17個自由度,其中單指就配備3個及以上的主動執行單元,接近真實人手單手22個自由度,能夠執行復雜的抓握任務。其內置的微驅動控制器主頻高達600MHz,定位誤差也保持在小于0.3°,最大效率也超過了95%,確保了數據傳輸的準確性和及時性。
行業發展趨勢
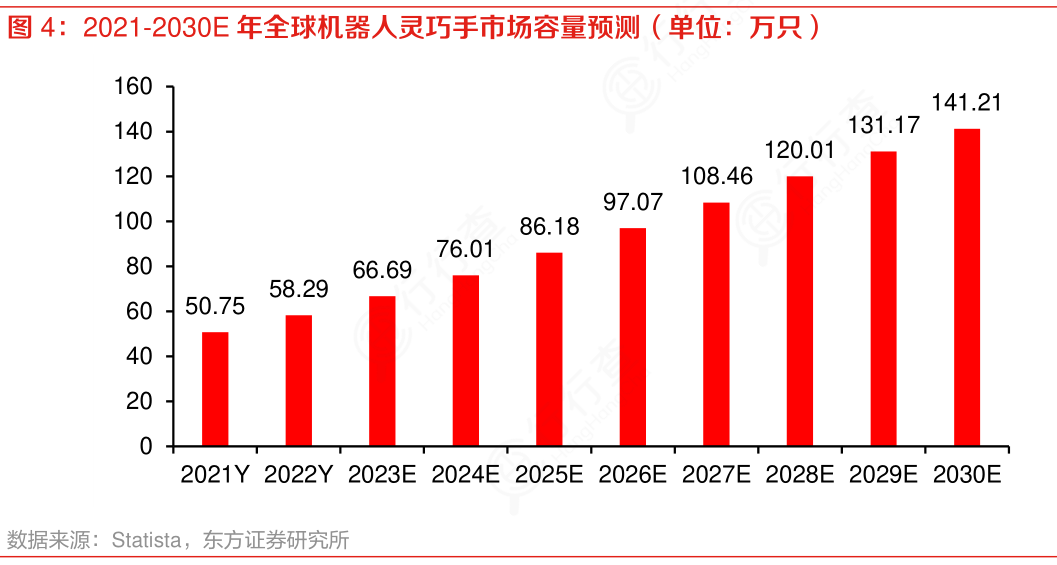
(數據來源:Statista,東方證券研究所)
根據Statista市場預測,預計2023年全球機器人靈巧手市場容量為66.69萬只,2024年將增長至76.01萬只,2030年市場容量將達到141.21萬只。市場需求的不斷增加反映了靈巧手在工業、服務機器人以及醫療康復等領域的廣泛應用前景。未來發展趨勢包括:
微型驅動器布局優化:將驅動器集成至手掌或手指內部,通過結構緊湊化設計提升靈巧手的靈活性和效率。
多感知功能融合:力傳感器、觸覺傳感器及位置傳感器的協同作用,使靈巧手能夠精準識別物體特性,實現更高水平的智能化操作。
多自由度設計:仿生化多自由度設計將繼續優化靈巧手的靈活性,使其能夠勝任精細抓取和復雜任務,為多場景應用提供支持。
機器人靈巧手的快速發展不僅重塑了工業制造與服務領域的生產模式,還為未來人機協作的無縫連接奠定了技術基礎。作為新一輪技術革命的核心組成部分,靈巧手將助力智能制造邁向更加靈活、高效、智能的新時代。





