
近日,廣州小鵬汽車科技有限公司在機器人技術領域邁出了新的一步,其申請的“機械腿結構及機器人”專利已正式對外公布。這一創(chuàng)新設計旨在優(yōu)化機器人的運動機制,通過減少驅動件數(shù)量來降低結構的復雜程度。
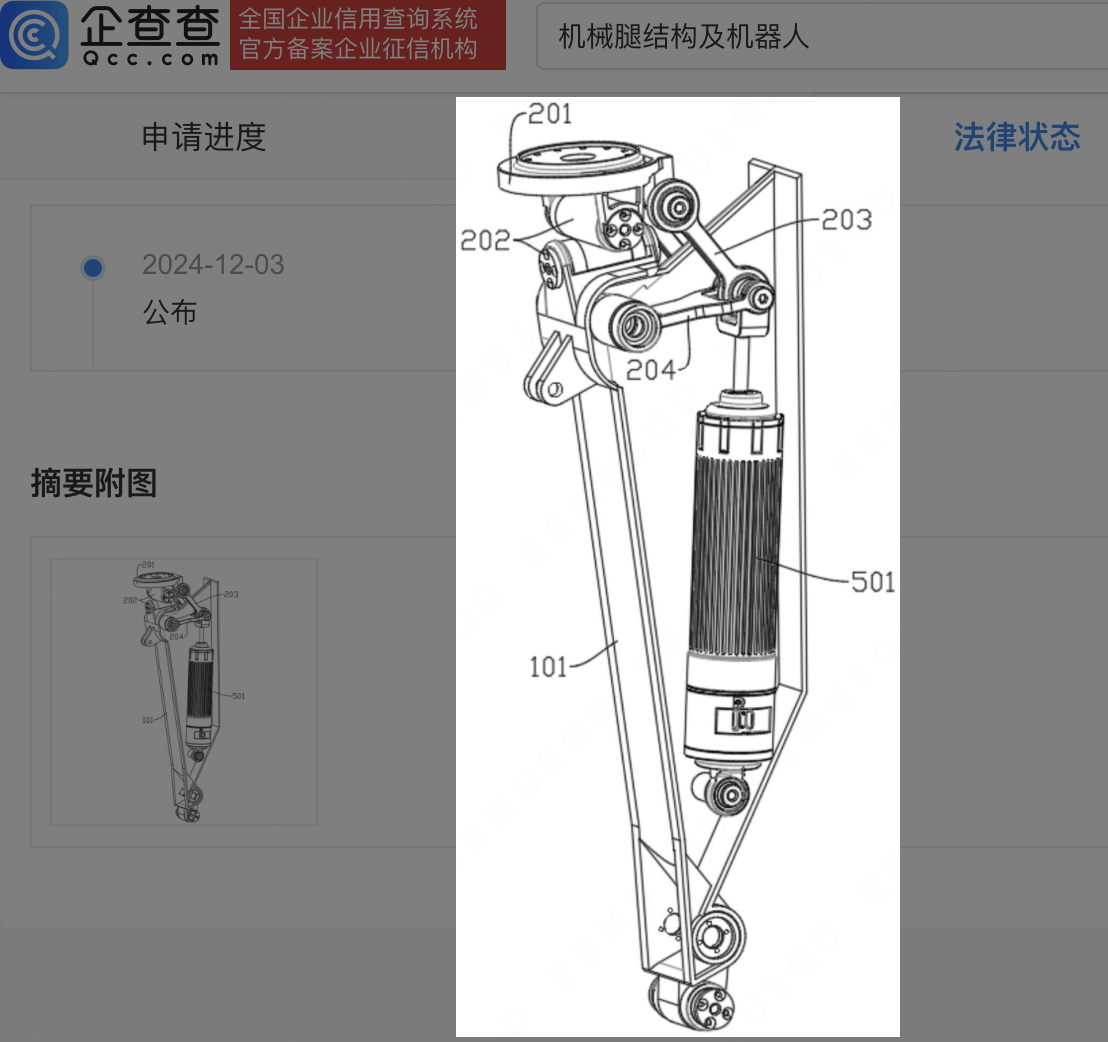
據(jù)專利摘要介紹,該機械腿結構主要包括腿部支架和髖關節(jié)組件。髖關節(jié)組件巧妙地安裝在腿部支架上,由回轉安裝架、十字軸以及髖部直線執(zhí)行器構成。回轉安裝架能夠與機器人主體直接或間接裝配連接,當受到驅動時,它能夠繞A軸轉動。十字軸的設計則更為精妙,它包含了髖部第一轉軸和髖部第二轉軸,分別能夠繞B軸和C軸轉動。值得注意的是,A軸、B軸和C軸之間均保持垂直關系。
髖部直線執(zhí)行器在機械腿結構中扮演著關鍵角色。它的第一端與腿部支架相連,第二端則與髖關節(jié)組件相接。通過驅動髖部直線執(zhí)行器,髖關節(jié)組件能夠靈活運動,進而帶動腿部支架繞B軸和/或C軸轉動。這種設計不僅提升了機器人的運動自由度,還顯著簡化了結構。
與傳統(tǒng)的機械腿設計相比,小鵬汽車的這一專利創(chuàng)新之處在于它無需為每個自由度的轉動都設置獨立的驅動件。通過巧妙的組合和多自由度轉動的實現(xiàn),該機械腿結構能夠在保證功能性的同時,降低制造成本和復雜度。
這一專利的公布,標志著廣州小鵬汽車科技有限公司在機器人技術領域取得了新的突破。隨著技術的不斷進步和應用的日益廣泛,這一創(chuàng)新設計有望為機器人行業(yè)的發(fā)展帶來新的活力和機遇。





