擊這里在線咨詢客服")
來(lái)源:機(jī)器之心
機(jī)器之心報(bào)道
編輯:張倩
我們什么時(shí)候能擺脫笨重的 VR 頭顯呢?
自從去年馬克 · 扎克伯格宣布將全力開(kāi)發(fā)「元宇宙」之后,VR、AR 等技術(shù)就在世界范圍內(nèi)掀起了新一輪的熱潮。
這些技術(shù)為計(jì)算機(jī)圖形應(yīng)用等領(lǐng)域提供了前所未有的用戶體驗(yàn)。然而,時(shí)至今日,VR 頭顯的笨重依然是一個(gè)繞不開(kāi)的問(wèn)題,同時(shí)也阻礙了 VR 走進(jìn)大眾的日常生活。
這一問(wèn)題源于 VR 顯示光學(xué)的放大原理,即通過(guò)透鏡將小型微顯示器的圖像放大。這種設(shè)計(jì)要求微顯示器和鏡片之間有一段相對(duì)較大的距離,因此當(dāng)前的 VR 頭顯普遍比較笨重,佩戴起來(lái)很不舒服。
 為了縮短微顯示器和鏡片之間的距離,研究者們想了很多種方法,包括借助「Pancake」透鏡或波導(dǎo)來(lái)折疊光路等。比如在基于 Pancake 技術(shù)方案的 VR 眼鏡中,圖像源發(fā)射光線進(jìn)入半反半透的鏡片之后,光線在鏡片、相位延遲片以及反射式偏振片之間多次折返,最終從反射式偏振片射出,因此能有效地縮小產(chǎn)品體積。
為了縮短微顯示器和鏡片之間的距離,研究者們想了很多種方法,包括借助「Pancake」透鏡或波導(dǎo)來(lái)折疊光路等。比如在基于 Pancake 技術(shù)方案的 VR 眼鏡中,圖像源發(fā)射光線進(jìn)入半反半透的鏡片之后,光線在鏡片、相位延遲片以及反射式偏振片之間多次折返,最終從反射式偏振片射出,因此能有效地縮小產(chǎn)品體積。
 傳統(tǒng)菲涅爾透鏡與新式 Pancake 透鏡的對(duì)比。
傳統(tǒng)菲涅爾透鏡與新式 Pancake 透鏡的對(duì)比。
最近兩年,我們已經(jīng)可以看到一些基于 Pancake 透鏡的 VR 眼鏡原型。但是,這些眼鏡通常還需要在微顯示器和鏡片之間留出一些距離,而且要么只能為每只眼睛呈現(xiàn) 2D 圖像(可能導(dǎo)致視覺(jué)不適),要么分辨率非常有限。
 在最近的一篇 SIGGRAPH 2022 論文中,來(lái)自英偉達(dá)和斯坦福大學(xué)的研究者展示了一種新的基于 Pancake 透鏡的 VR 眼鏡—— Holographic Glasses(全息眼鏡)。它的厚度只有 2.5 毫米,重 60 克,可以向佩戴者的每只眼睛展示 2D 或 3D 圖像。
在最近的一篇 SIGGRAPH 2022 論文中,來(lái)自英偉達(dá)和斯坦福大學(xué)的研究者展示了一種新的基于 Pancake 透鏡的 VR 眼鏡—— Holographic Glasses(全息眼鏡)。它的厚度只有 2.5 毫米,重 60 克,可以向佩戴者的每只眼睛展示 2D 或 3D 圖像。
 研究者表示,他們的 Holographic Glasses 基于最近的一類(lèi)想法——使用人工智能技術(shù)來(lái)提高圖像質(zhì)量,并加速計(jì)算機(jī)生成的全息圖(computer-generated holograms,CGH)的計(jì)算速度。
研究者表示,他們的 Holographic Glasses 基于最近的一類(lèi)想法——使用人工智能技術(shù)來(lái)提高圖像質(zhì)量,并加速計(jì)算機(jī)生成的全息圖(computer-generated holograms,CGH)的計(jì)算速度。
技術(shù)細(xì)節(jié)
這個(gè)眼鏡主要由三部分組成:一個(gè)虛擬全息顯示部件、一個(gè)幾何相位透鏡(GP lens)和一個(gè)基于瞳孔復(fù)制的波導(dǎo)系統(tǒng)。
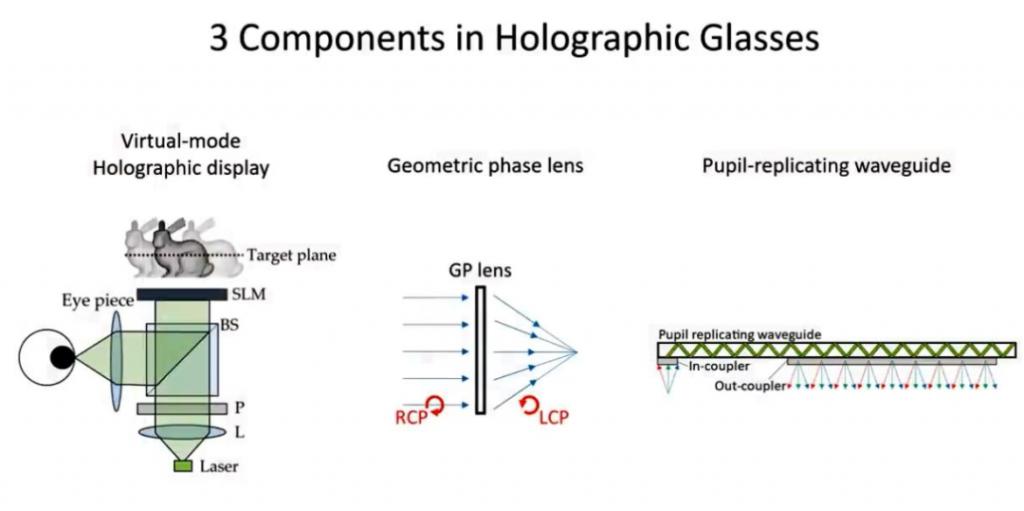 首先來(lái)看虛擬全息顯示部件。在多數(shù)情況下,phase-only SLM(空間光調(diào)制器)會(huì)在設(shè)備前創(chuàng)建一個(gè)全息圖。但其實(shí),它也可以在設(shè)備后創(chuàng)建,這樣一來(lái),所有的部件都靠得更近了,系統(tǒng)體積大大縮小。
首先來(lái)看虛擬全息顯示部件。在多數(shù)情況下,phase-only SLM(空間光調(diào)制器)會(huì)在設(shè)備前創(chuàng)建一個(gè)全息圖。但其實(shí),它也可以在設(shè)備后創(chuàng)建,這樣一來(lái),所有的部件都靠得更近了,系統(tǒng)體積大大縮小。
 接下來(lái)是基于瞳孔復(fù)制的波導(dǎo)系統(tǒng)。研究者使用該系統(tǒng)代替分束器來(lái)進(jìn)一步減小系統(tǒng)形狀因子。相干光源耦合到波導(dǎo)中,并為 SLM 提供相干照明。他們使用市場(chǎng)上可以買(mǎi)到的用于流入光源的波導(dǎo),這些光源會(huì)導(dǎo)致某些波長(zhǎng)的光照不均勻,但這可以通過(guò)不同的分級(jí)設(shè)計(jì)最小化。
接下來(lái)是基于瞳孔復(fù)制的波導(dǎo)系統(tǒng)。研究者使用該系統(tǒng)代替分束器來(lái)進(jìn)一步減小系統(tǒng)形狀因子。相干光源耦合到波導(dǎo)中,并為 SLM 提供相干照明。他們使用市場(chǎng)上可以買(mǎi)到的用于流入光源的波導(dǎo),這些光源會(huì)導(dǎo)致某些波長(zhǎng)的光照不均勻,但這可以通過(guò)不同的分級(jí)設(shè)計(jì)最小化。
 最后,研究者用幾何相位透鏡(GP lens)代替接目鏡。幾何相位透鏡非常輕,但它僅在特定的輸入光束偏振下作為正透鏡工作,由于大多數(shù) SLM 也在線性偏振輸入光下工作,他們?cè)?SLM 和幾何相位透鏡之間安裝了一個(gè)波板。
最后,研究者用幾何相位透鏡(GP lens)代替接目鏡。幾何相位透鏡非常輕,但它僅在特定的輸入光束偏振下作為正透鏡工作,由于大多數(shù) SLM 也在線性偏振輸入光下工作,他們?cè)?SLM 和幾何相位透鏡之間安裝了一個(gè)波板。
 通過(guò)將這些部件組裝在一起,研究者做出了 Holographic Glasses。
通過(guò)將這些部件組裝在一起,研究者做出了 Holographic Glasses。
 Holographic Glasses 的顯示特性在很大程度上取決于 SLM 和接目鏡。SLM 尺寸越大,視場(chǎng)(FOV,定義了在水平、垂直和對(duì)角線方向上的可視范圍)越大;SLM 像素間距越小,eye box(近眼顯示光學(xué)模組與眼球之間的一塊錐形區(qū)域,也是顯示內(nèi)容最清晰的區(qū)域)越大。
Holographic Glasses 的顯示特性在很大程度上取決于 SLM 和接目鏡。SLM 尺寸越大,視場(chǎng)(FOV,定義了在水平、垂直和對(duì)角線方向上的可視范圍)越大;SLM 像素間距越小,eye box(近眼顯示光學(xué)模組與眼球之間的一塊錐形區(qū)域,也是顯示內(nèi)容最清晰的區(qū)域)越大。
 Holographic Glasses 還有兩個(gè)不同于傳統(tǒng) VR 眼鏡的特性。
Holographic Glasses 還有兩個(gè)不同于傳統(tǒng) VR 眼鏡的特性。
第一個(gè)特性是高衍射級(jí)(HDOs)。優(yōu)秀像素的周期性結(jié)構(gòu)產(chǎn)生了重復(fù)的高衍射級(jí),并且由于接目鏡的作用,它們沿著瞳孔平面收斂。如果高衍射級(jí)的間隔小于瞳孔直徑,那么用 HOGD 算法進(jìn)行相位計(jì)算時(shí)就必須考慮高衍射級(jí)。

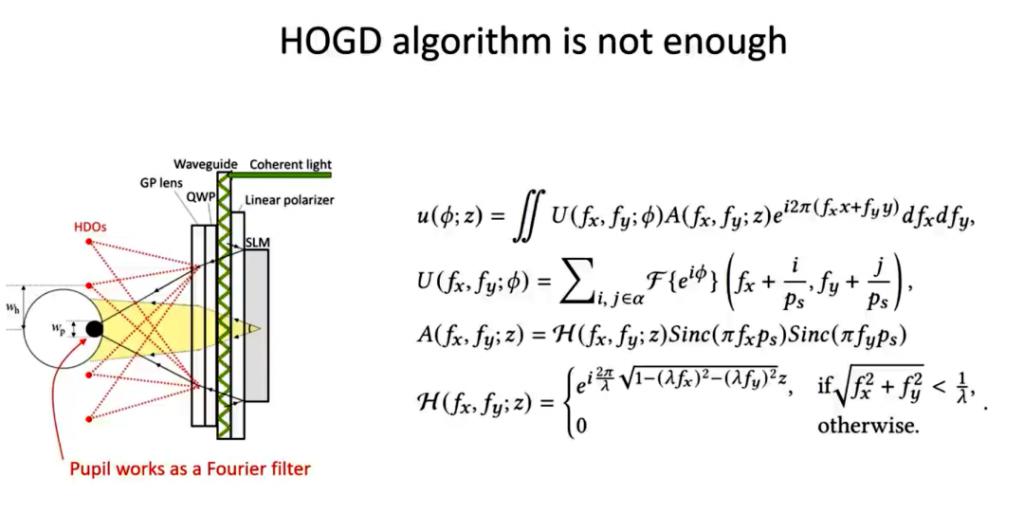 瞳孔掩蔽項(xiàng) M_p 將 HOGD 算法擴(kuò)展為「瞳孔 HOGD(Pupil-HOGD)」算法。它使相位模式得到優(yōu)化,同時(shí)考慮瞳孔濾波。
瞳孔掩蔽項(xiàng) M_p 將 HOGD 算法擴(kuò)展為「瞳孔 HOGD(Pupil-HOGD)」算法。它使相位模式得到優(yōu)化,同時(shí)考慮瞳孔濾波。
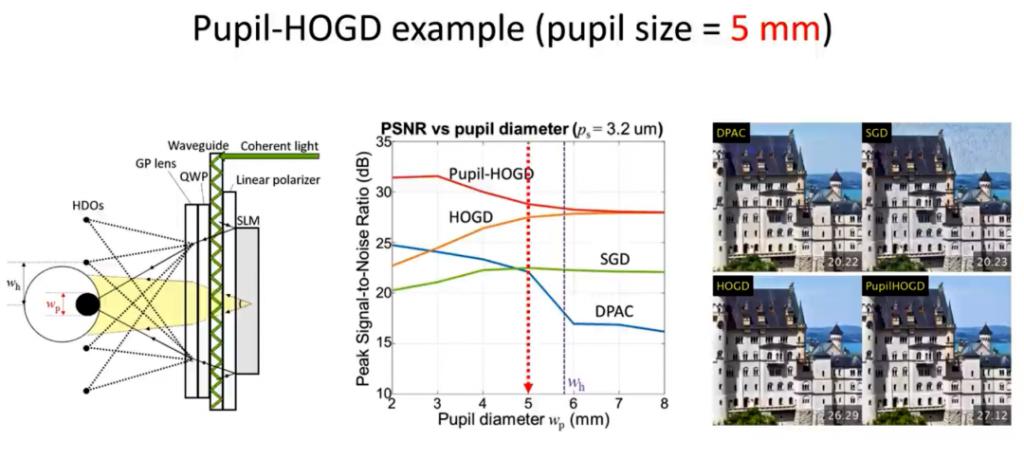
 仿真結(jié)果表明,與雙相位幅度編碼(DPAC)隨機(jī)梯度下降和傳統(tǒng)的 HOGD 算法相比,瞳孔 HOGD 算法在所有瞳孔大小下的圖像質(zhì)量最好。
仿真結(jié)果表明,與雙相位幅度編碼(DPAC)隨機(jī)梯度下降和傳統(tǒng)的 HOGD 算法相比,瞳孔 HOGD 算法在所有瞳孔大小下的圖像質(zhì)量最好。

 第二個(gè)特性是動(dòng)態(tài) eye box。
第二個(gè)特性是動(dòng)態(tài) eye box。

 由于波導(dǎo)被設(shè)計(jì)用來(lái)再現(xiàn)具有一定范圍的瞬時(shí)光角的光場(chǎng),所以整個(gè) SLM 照明的方向可以由輸入光束的方向控制。有了額外的柵極跟蹤器,系統(tǒng)可以跟隨注視,并通過(guò)簡(jiǎn)單地改變輸入光束的方向來(lái)圍繞視點(diǎn)移動(dòng)。
由于波導(dǎo)被設(shè)計(jì)用來(lái)再現(xiàn)具有一定范圍的瞬時(shí)光角的光場(chǎng),所以整個(gè) SLM 照明的方向可以由輸入光束的方向控制。有了額外的柵極跟蹤器,系統(tǒng)可以跟隨注視,并通過(guò)簡(jiǎn)單地改變輸入光束的方向來(lái)圍繞視點(diǎn)移動(dòng)。
 研究者實(shí)現(xiàn)了兩種形態(tài)的原型機(jī):臺(tái)式和可穿戴式。二者之間的唯一區(qū)別是可穿戴式使用了波導(dǎo)。
研究者實(shí)現(xiàn)了兩種形態(tài)的原型機(jī):臺(tái)式和可穿戴式。二者之間的唯一區(qū)別是可穿戴式使用了波導(dǎo)。
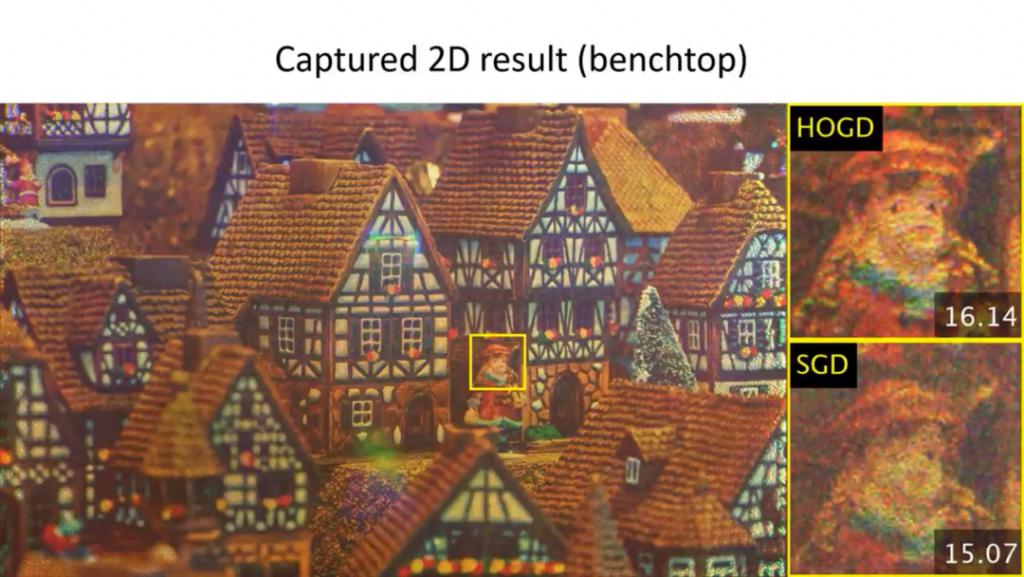
 下圖顯示了臺(tái)式原型機(jī)捕捉到的結(jié)果。放大后的細(xì)節(jié)顯示,HOGD 算法呈現(xiàn)出了更高的圖像質(zhì)量和更高的對(duì)比度。
下圖顯示了臺(tái)式原型機(jī)捕捉到的結(jié)果。放大后的細(xì)節(jié)顯示,HOGD 算法呈現(xiàn)出了更高的圖像質(zhì)量和更高的對(duì)比度。
下面還有一個(gè)例子,紅色箭頭顯示的是由于 GP 透鏡缺失導(dǎo)致的 SLM 雜散光造成的偽影。
 下圖是用臺(tái)式原型機(jī)捕獲的多平面 3D 結(jié)果。結(jié)果顯示,在不同的平面上對(duì)焦圖像是正確的,可以誘發(fā)使用者的適應(yīng)反射。
下圖是用臺(tái)式原型機(jī)捕獲的多平面 3D 結(jié)果。結(jié)果顯示,在不同的平面上對(duì)焦圖像是正確的,可以誘發(fā)使用者的適應(yīng)反射。
 下圖是可穿戴式原型機(jī)生成的結(jié)果:圖像質(zhì)量、對(duì)比度均較差,這主要是由于波導(dǎo)與實(shí)現(xiàn)的相干光源之間不匹配,可以通過(guò)不同的分級(jí)設(shè)計(jì)來(lái)改善。
下圖是可穿戴式原型機(jī)生成的結(jié)果:圖像質(zhì)量、對(duì)比度均較差,這主要是由于波導(dǎo)與實(shí)現(xiàn)的相干光源之間不匹配,可以通過(guò)不同的分級(jí)設(shè)計(jì)來(lái)改善。
 局限性
局限性
從當(dāng)前的技術(shù)介紹來(lái)看,這款 VR 眼鏡還有一些局限。
第一個(gè)局限是 FOV。雖然這款眼鏡的 FOV 有望超過(guò)當(dāng)前這一代的 VR 頭顯,但現(xiàn)在我們能看到的這版只有 22.8°。
「這款 Holographic Glasses 的 FOV 比當(dāng)前市場(chǎng)上可以買(mǎi)到的 VR/AR 頭顯都要小。但是,F(xiàn)OV 主要受 SLM 尺寸和 GP 透鏡焦距的限制,二者都可以通過(guò)不同的部件加以改善。」研究者表示。
另一個(gè)局限是,這款眼鏡可能需要非常精確地測(cè)量用戶的瞳孔。如果沒(méi)有經(jīng)過(guò)精巧的設(shè)計(jì),這是很難實(shí)現(xiàn)的。不過(guò),研究人員指出,使用紅外凝視跟蹤器可以做到這一點(diǎn),但你需要能夠不斷跟蹤佩戴者的瞳孔大小,因?yàn)樵谑褂醚坨R時(shí),它們會(huì)經(jīng)常調(diào)整以適應(yīng)不同的光線條件。
即便如此,這款 VR 眼鏡還是有很多令人印象深刻的地方,不知道哪家公司會(huì)率先將其商業(yè)化。





