
車水馬龍的道路上,各種車輛交錯匯聚,各種道路狀況頻出。從行駛緩慢的環衛車到疾駛搶道的出租車、因施工臨時封閉的道路、突發的交通事故現場。作為路面上的車輛,是互不相讓,還是借道通過,又或者是重新規劃路線,到達目的地?這一切都考驗著“駕駛者”的應變力及現場決策力。
這是去年11月在上海舉行的中國智能車未來挑戰賽的比賽場景:無人車與人類駕駛的車輛同場競技,以應對真實交通環境下的種種考驗,以證明其自主行駛的能力。在這場比賽中,同濟大學“途靈TiEV”智能無人車成功完成了重新規劃路線避開擁堵路段,遭遇緩慢行駛車輛的擇機超車,以及在封鎖路段旁的借道行駛等幾項闖關考試,取得佳績。
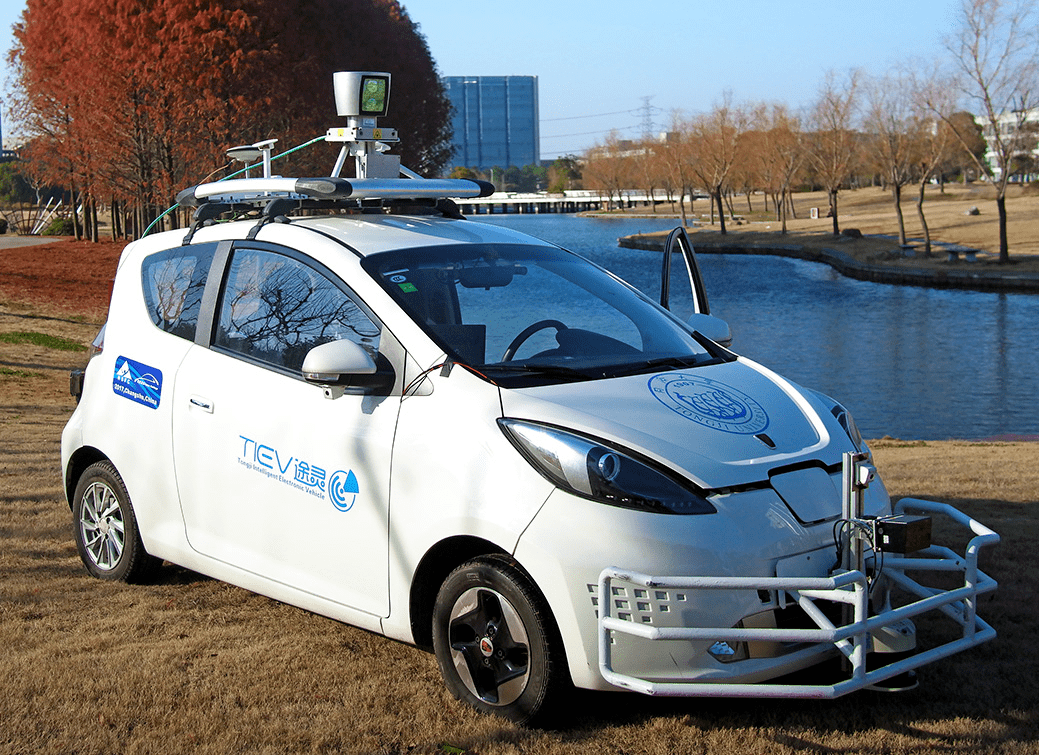
同濟大學“途靈TiEV”智能無人車實驗室創立于2015年,隸屬于同濟大學嵌入式系統與服務計算教育部重點實驗室。6年來,“途靈TiEV”智能無人車實驗室一直致力于研發L4級全自動駕駛系統。2018年,“途靈TiEV”智能無人車實驗室與UCloud優刻得合作,將車智能的核心“駕駛腦”的訓練搬上云端,推動智能無人車研發進入新階段。
“駕駛腦”的三道難題
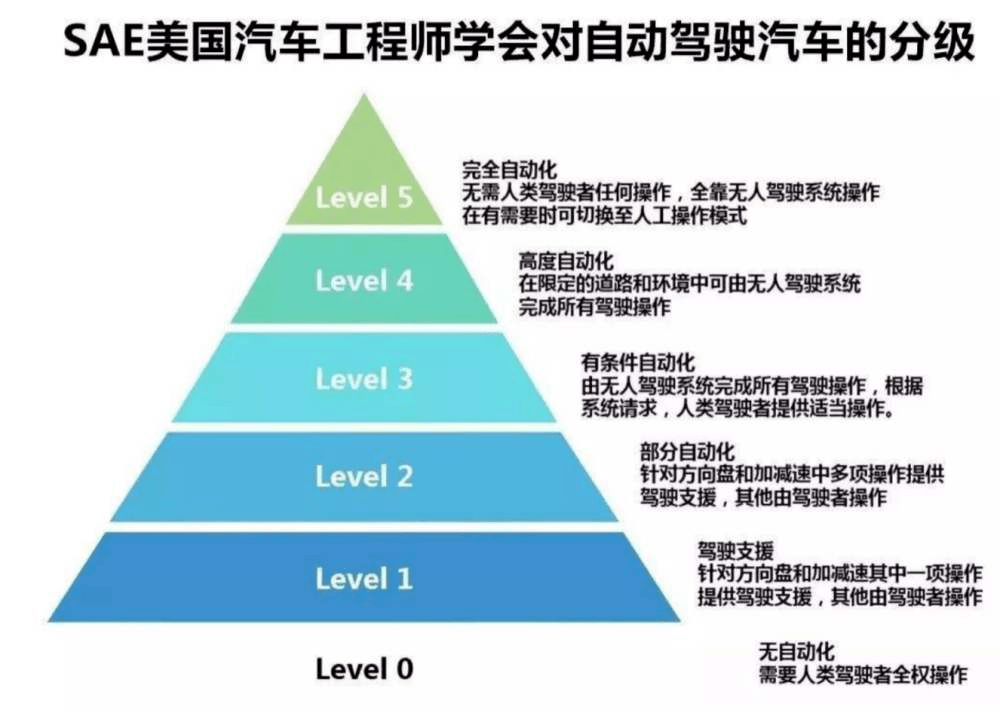
從特斯拉到百度Robot-Taxi,自動駕駛車不斷走進大眾視野,但真正達到“自動駕駛”級的車輛并不多,按照自動駕駛汽車級別劃分的標準,大家耳熟能詳的特斯拉處于L2級——自動輔助駕駛系統,奧迪A8搭載的是L3級輔助自動駕駛;而百度自動駕駛出租車Robot-Taxi是少數投產的L4級全自動駕駛車輛,但目前只能在特定區域內行駛。
要真正實現L4自動駕駛“自由”,關鍵在于指揮中樞“駕駛腦”的智能程度。目前,同濟大學“途靈TiEV”智能無人車實驗室正在攻克的課題就是提高L4級自動駕駛技術突破環境局限的能力,這種突破需要將駕駛腦放置在仿真模擬場景下進行大量的極限訓練。比如,在夜間隧道行駛,測試自動駕駛車輛能否通過調用多線激光雷達、多線攝像頭,毫米微波雷達來識別周圍行駛的車輛、行人,并精準判斷自己與他們之間的距離,做到及時避讓;或者,在信號不好的過江隧道里,自動駕駛汽車能否通過云端傳輸,順利定位隧道出口的位置,遠程規劃行駛方向等等,讓駕駛腦在嚴格的環境考驗下“學習成長”。
“駕駛腦的訓練,需要解決三個核心問題:我在哪?我要去哪?我怎么去?即自主定位,動態路線規劃,及障礙規避。”據“途靈TiEV”智能無人車實驗室的相關負責人葉晨介紹,只有 “駕駛腦”具備了真實環境下的感知力和應變力,才能真正實現自動駕駛的安全性和舒適性。這離不開海量路況數據支撐下數以萬計的訓練。
上云助力“駕駛腦”成長
2018年,同濟大學與UCloud優刻得合作,將駕駛腦的學習和訓練放到云上。從基礎路況數據搜集、在線模擬訓練,到上路測試,云都在發揮重要作用。
“途靈TiEV”智能無人車實驗室啟用云端導航服務器,實時同步其他機構發布的交通流信息,充實無人車訓練時所需要的基礎路況信息數據庫。一旦掌握足夠數量的路況信息,駕駛腦可進行行駛軌跡、路況障礙,以及潛在事故風險分析和預判,不斷進化。比如,識別路口的紅綠燈指示,從單純的豎放紅綠燈,到橫放紅綠燈,再到有樹木遮擋的紅綠燈,駕駛腦只有通過不斷的識別、認知和學習,才能將不同形態的紅綠燈統一“標注”為“紅綠燈”,正確決策行駛路徑。
上路測試中,云也在發揮積極作用。在路線規劃階段,駕駛腦的工作分為全局規劃導航和局部路徑規劃。全局規劃導航,在提前確認的起點和終點之間規劃行駛路徑;局部路徑規劃,即在行駛過程中,針對動態特殊路況,進行即時判斷和決策。前者可以依靠云上大數據進行規劃,后者則依靠本地計算進行實時動態決策。通過云+本地計算互相配合,以及長途+短途規劃相結合,提高駕駛腦的運行效率和決策的精準性。
目前,在“途靈TiEV”智能無人車仿真實驗中,龐大的數據運轉和計算都建立在UCloud優刻得提供的快杰云主機和GPU云服務器基礎上,確保“駕駛腦”實現各種極限環境下的高強度訓練。
在同濟大學無人車實驗室相關負責人葉晨看來,云是支持自動駕駛進行高強度仿真訓練的基礎技術,幫助提高自動駕駛應對復雜路況的能力。未來隨著5G發展,“駕駛腦”可獲取的技術支持也會更多元,這都能幫助自動駕駛技術發展成熟,向真正全自動無人駕駛的未來不斷邁進。





