擊這里在線咨詢客服")
行為預(yù)測是指根據(jù)過去物體的運(yùn)動(dòng)軌跡,預(yù)測物體將來一小段時(shí)間內(nèi)的運(yùn)動(dòng)軌跡。主要包括行人軌跡預(yù)測和車輛軌跡預(yù)測。
行為預(yù)測是指根據(jù)過去物體的運(yùn)動(dòng)軌跡,預(yù)測物體將來一小段時(shí)間內(nèi)的運(yùn)動(dòng)軌跡。主要包括行人軌跡預(yù)測和車輛軌跡預(yù)測。
這里主要是對(duì)2014年的一篇綜述論文《a survey on motion prediction and risk assessment for intelligent vehicles》進(jìn)行分析。
為什么需要行為預(yù)測?
因?yàn)轭A(yù)測可以提高規(guī)劃控制的穩(wěn)定度和舒適度。以圖1為例,假設(shè)我們發(fā)現(xiàn)前面有一輛車要左轉(zhuǎn),如果我們不預(yù)測前面車輛的意圖,我們當(dāng)前有3種選擇,第一種直行,第二種右轉(zhuǎn),第三種左轉(zhuǎn)。可以看到左轉(zhuǎn)是最差的選擇,直行其次,最好的選擇是右轉(zhuǎn),可以避免緊急停車或者交通事故,而且可以提前規(guī)劃出一條比較舒適的軌跡,對(duì)自動(dòng)駕駛汽車來說,可以規(guī)劃出一條容易控制的軌跡。
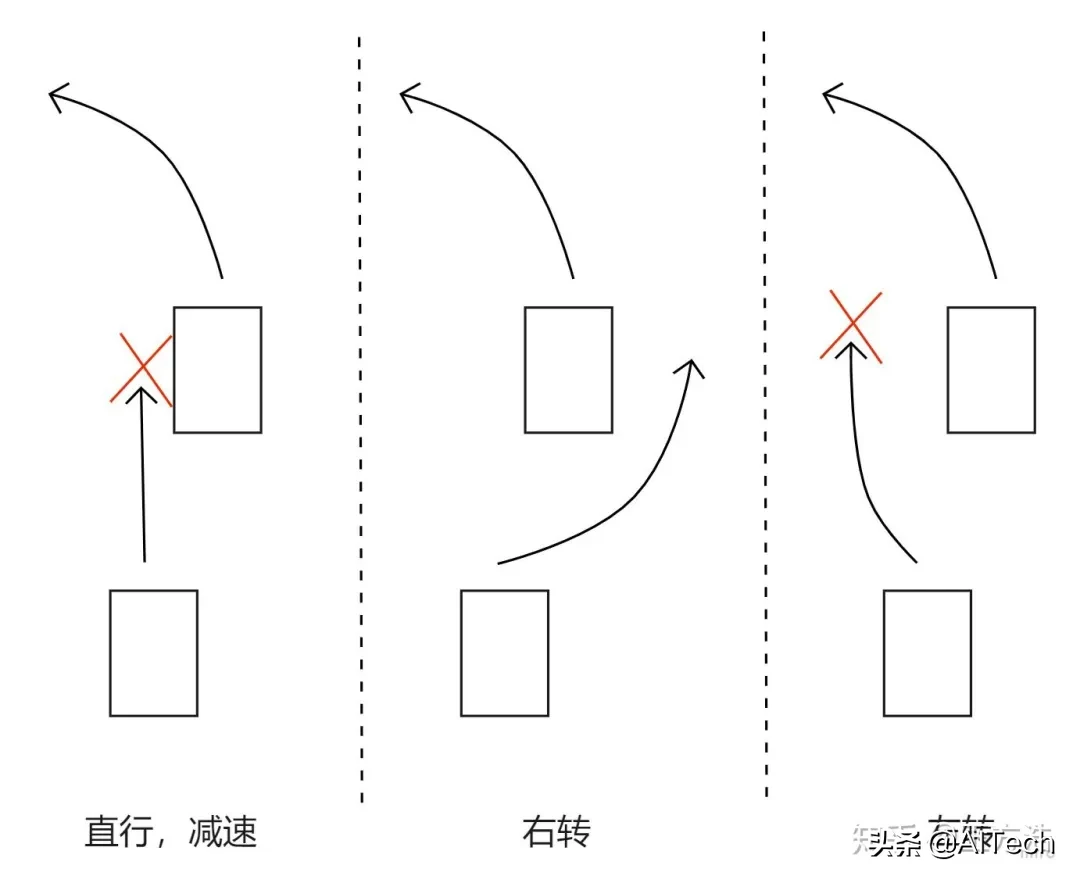
圖1 汽車行為預(yù)測示意圖
預(yù)測特點(diǎn)
知道了為什么需要行為預(yù)測,那么預(yù)測有哪些特點(diǎn)呢?
Tracking是預(yù)測的基礎(chǔ) - 前面我們介紹了大量軌跡追蹤的工作,進(jìn)行軌跡追蹤的目的就是為了軌跡預(yù)測。就好像預(yù)測股票走勢,需要通過股票的歷史軌跡來預(yù)測將來的軌跡,如果只是根據(jù)當(dāng)前的點(diǎn)位來進(jìn)行預(yù)測,極有可能會(huì)偏差很大。所以如果我們提前把物體的運(yùn)動(dòng)軌跡保存起來,然后進(jìn)行分析預(yù)測,這樣就能夠大大提高預(yù)測的準(zhǔn)確性,所以說Tracking是預(yù)測的基礎(chǔ)。
預(yù)測只能預(yù)測一小段時(shí)間內(nèi)會(huì)出現(xiàn)的情況 - 由于預(yù)測都是基于概率和經(jīng)驗(yàn)的假設(shè),而且車和車之間,車和環(huán)境之間都會(huì)相互影響,因此只要一個(gè)變量改變,那么其它的變量可能會(huì)跟著改變,因此無法預(yù)測未來很長一段時(shí)間的情況。
問題定義
接下來我們對(duì)預(yù)測進(jìn)行問題進(jìn)行定義,把預(yù)測抽象為一個(gè)數(shù)學(xué)問題,那么什么是預(yù)測呢?
我們可以把預(yù)測的軌跡抽象為一個(gè)個(gè)點(diǎn)(xt, yt),一直從t時(shí)刻到t+m時(shí)刻,其中有N個(gè)車,因此就有N條軌跡。下式就代表預(yù)測N個(gè)車輛從t時(shí)刻到t+m時(shí)刻的軌跡集合。
那么預(yù)測問題,就可以抽象為預(yù)測這個(gè)軌跡集合的概率分布。

方法分類
根據(jù)問題的定義,我們可以對(duì)自動(dòng)駕駛軌跡預(yù)測的方法分為3類。
- Physics-based motion models 物理模型
- Maneuver-based motion models 意圖模型
- Interaction-aware motion models 交互模型
我們先通過一張圖來了解這3種方法的區(qū)別。
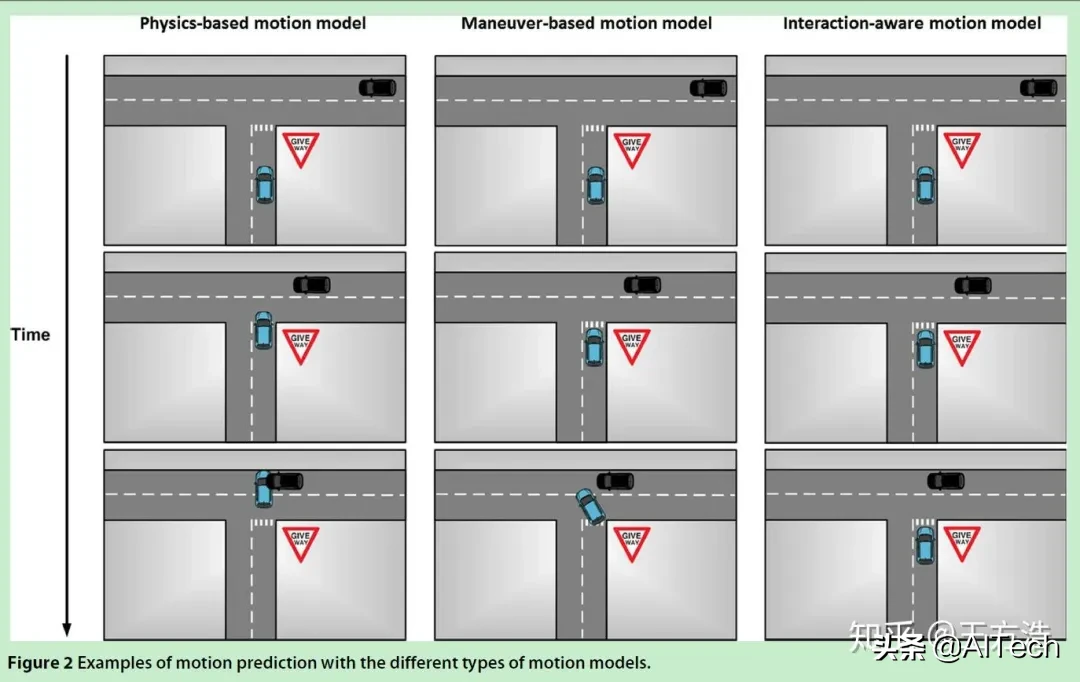
圖2 3種預(yù)測模型的區(qū)別
可以看到物理模型只是通過車輛的運(yùn)動(dòng)模型來進(jìn)行預(yù)測,沒有考慮到交通規(guī)則和其它車的交互,因此當(dāng)經(jīng)過路口的時(shí)候和行駛的車輛發(fā)生了碰撞。意圖模型理解了交通規(guī)則,在路口時(shí)停車了,并且經(jīng)過路口的時(shí)候也會(huì)對(duì)車輛進(jìn)行避讓,但是由于沒有和其它車的交互,因此可能會(huì)出現(xiàn)碰撞,也可能導(dǎo)致汽車規(guī)劃出一條很急的軌跡。最后交互模型考慮了交通規(guī)則,并且知道有車輛靠近,因此會(huì)等待直行的車輛經(jīng)過之后再左轉(zhuǎn)。
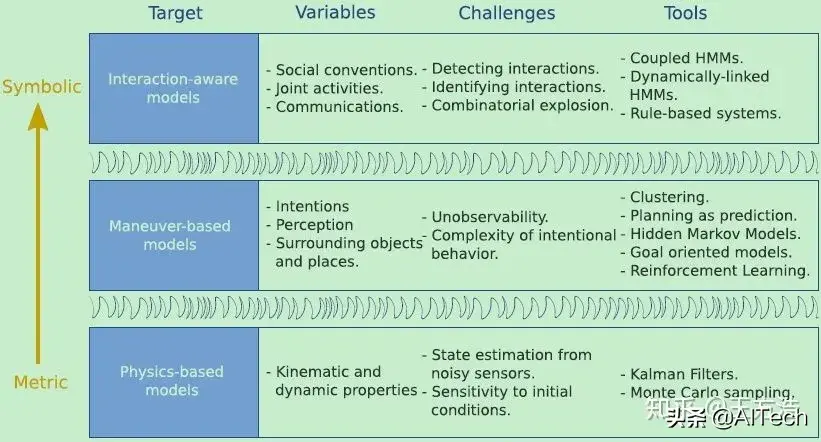
下圖是三種模型的對(duì)比,輸入的參數(shù),挑戰(zhàn)和用到的方法。
下面我們逐個(gè)說明這3種模型。
Physics-based motion models 物理模型
根據(jù)汽車模型的劃分,可以分為
- Dynamic models(動(dòng)力學(xué)模型)
- Kinematic models(運(yùn)動(dòng)學(xué)模型)
因?yàn)閯?dòng)力學(xué)模型非常復(fù)雜,比較常用的是汽車運(yùn)動(dòng)學(xué)模型,把汽車當(dāng)做一個(gè)剛體,根據(jù)剛體運(yùn)動(dòng)預(yù)測汽車的軌跡,有3種方法。
- Single trajectory simulation 根據(jù)運(yùn)動(dòng)學(xué)模型進(jìn)行計(jì)算,沒有考慮不確定情況,因此不適合做長期預(yù)測。
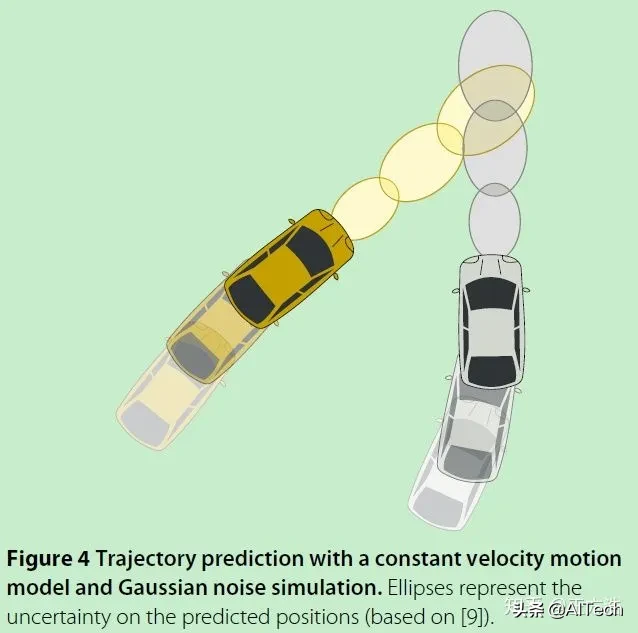
- Gaussian noise simulation 車輛的不確定性描述為高斯模型,通過卡爾曼濾波和貝葉斯網(wǎng)絡(luò)對(duì)車的狀態(tài)進(jìn)行預(yù)測。
- Monte Carlo simulation 蒙特卡洛模型,根據(jù)速度、加速度對(duì)可能的區(qū)域進(jìn)行采樣,生成預(yù)測路徑。
Gaussian noise simulation 車輛的不確定性描述為高斯模型,通過卡爾曼濾波和貝葉斯網(wǎng)絡(luò)對(duì)車的狀態(tài)進(jìn)行預(yù)測。
Monte Carlo simulation 蒙特卡洛模型,根據(jù)速度、加速度對(duì)可能的區(qū)域進(jìn)行采樣,生成預(yù)測路徑。可以看到相對(duì)高斯模型,蒙特卡洛模型更加考慮到了汽車的運(yùn)動(dòng)學(xué)規(guī)律,在沿著汽車當(dāng)前行駛方向的概率高,偏離軌跡的概率要低。
物理模型的缺點(diǎn)主要是缺乏對(duì)交通規(guī)則的理解,沒有和其它車輛的交互,當(dāng)其它車輛減速、轉(zhuǎn)彎的時(shí)候無法很好的預(yù)測。
Maneuver-based motion models 意圖模型
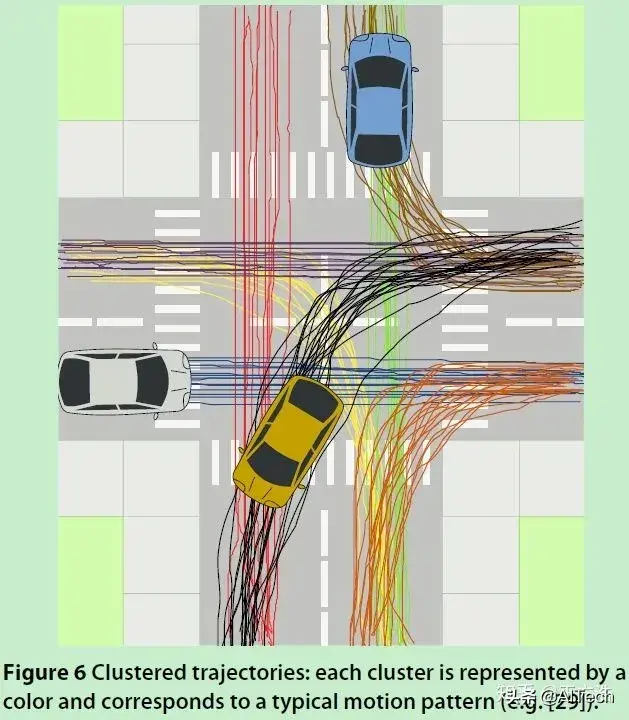
Prototype trajectories 原型軌跡,車的軌跡可以分為一系列的簇,每一簇對(duì)應(yīng)一個(gè)典型的運(yùn)動(dòng)模式。
基于意圖的模型主要是分為2部分,一是對(duì)意圖進(jìn)行評(píng)估,然后再執(zhí)行。
- Maneuver intention estimation (評(píng)估)
- Maneuver execution(執(zhí)行)
缺點(diǎn)是對(duì)時(shí)間的定性約束,車輛非常多的情況,不能應(yīng)用到其它拓?fù)浣Y(jié)構(gòu)的道路。
Interaction-aware motion models 交互模型
主要的方法分為2類。
- trajectory prototypes
- Dynamic Bayesian Networks
比物理模型預(yù)測的時(shí)間更久,比基于意圖的預(yù)測更加穩(wěn)定,計(jì)算多個(gè)汽車之間的關(guān)系計(jì)算量比較大。
最后還提供了一些風(fēng)險(xiǎn)評(píng)估的方法。
RISK ASSESSMENT 風(fēng)險(xiǎn)評(píng)估
- Risk based on colliding future trajectories
- Binary collision prediction
- Probabilistic collision prediction
- Other risk indicators
- Risk based on unexpected behavior
- Detecting unusual events
- Detecting conflicting maneuvers
總結(jié)
論文中提出了3種對(duì)車輛進(jìn)行軌跡預(yù)測的方法,并且對(duì)比了3種方法的優(yōu)缺點(diǎn),這篇論文寫的比較早2014年,目前state-of-art的方法是基于RNN的深度學(xué)習(xí)方法,當(dāng)然通過這篇論文我們可以了解自動(dòng)駕駛軌跡預(yù)測的經(jīng)典方法,并且學(xué)習(xí)對(duì)車輛進(jìn)行風(fēng)險(xiǎn)評(píng)估。
本文來源:分子運(yùn)動(dòng)
本文僅作學(xué)術(shù)分享,著作權(quán)歸作者所有,如有侵權(quán),請(qǐng)聯(lián)系后臺(tái)作刪文處理。





