
本文將以車輛三自由度模型為基礎,利用擴展卡爾曼濾波,通過車輛的側向加速度來估計橫擺角速度、質心側偏角、縱向速度等三個參數,通過一個實際的仿真案例來進行具體介紹擴展卡爾曼濾波的使用。
一般地,卡爾曼濾波會選擇比較容易獲取的參數,來估計不易測量的參數。
在這里,腳主把卡爾曼參數估計仿真分為四個步驟:
1)車輛模型搭建;
2)擴展卡爾曼濾波算法搭建;
3)模型整合及仿真工況設置;
4)仿真及結果分析。
車輛模型搭建
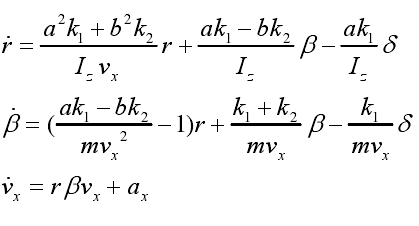
本例中,利用車輛三自由度模型(如下圖)進行參數估計,需要知道車輛的輸入信號(車輪轉角、縱向加速度)和輸出信號(側向加速度),所以需要自己搭建一個車輛模型來創造這些數據。即對車輛模型輸入一個方向盤轉角和縱向加車速,得到側向加速度。
在實車上,這一步是可以忽略的,因為我們可以通過傳感器直接測量卡爾曼濾波所需的信號。
腳主暫時選擇比較簡便的方法,借助carsim中的車輛模型來完成這項工作,僅需要設置好我們關注的車輛基本參數及信號接口即可。
質心到前后軸距離、沿Z軸轉動慣量、質量設置位置如下圖。

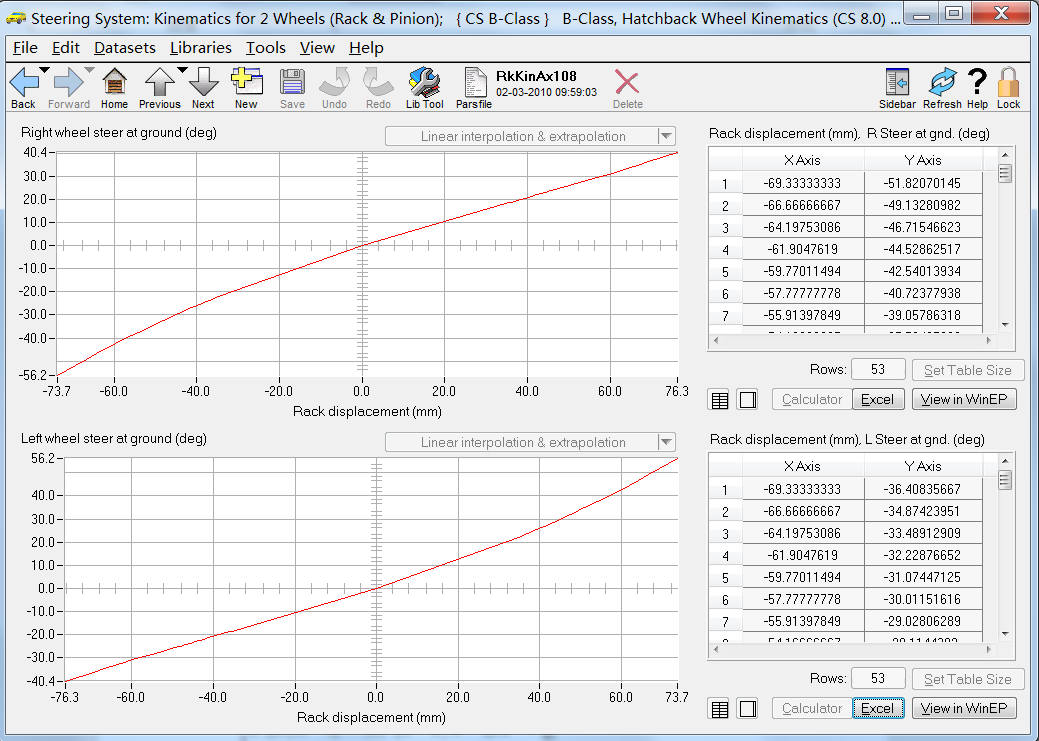
前后輪側偏剛度設置位置如下圖。

方向盤轉角到車輪轉角的傳動比設置位置如下圖。
輸出接口選擇輸出橫擺角速度、質心側偏角、縱向車速、方向盤轉角、縱向加速度、側向加速度。前三個是待估計的參數,用于與仿真結果對比;后三個是車輛的輸入輸出信號,會作為卡爾曼濾波算法的輸入。

一直用別人的車輛模型也不合適,后面腳主會自己動手搭建車輛模型,這樣就可以避免聯合仿真的麻煩,仿真可以全部在simulink中實現了。更重要的是自己搭建車輛模型更加能加深對車輛的理解,這個是商業軟件所無法替代的。
擴展卡爾曼濾波算法搭建
擴展卡爾曼濾波算法就是把上文提到的5個核心公式表達出來。再次強調一下:需要使用非線性函數f、h來表示狀態方程和輸出方程;系統矩陣A、輸出矩陣H需要用f、h函數求偏導后的雅克比矩陣表示。

腳主這里借助以前搭建的卡爾曼濾波算法,稍微改動一下,得到如下圖的擴展卡爾曼濾波算法。
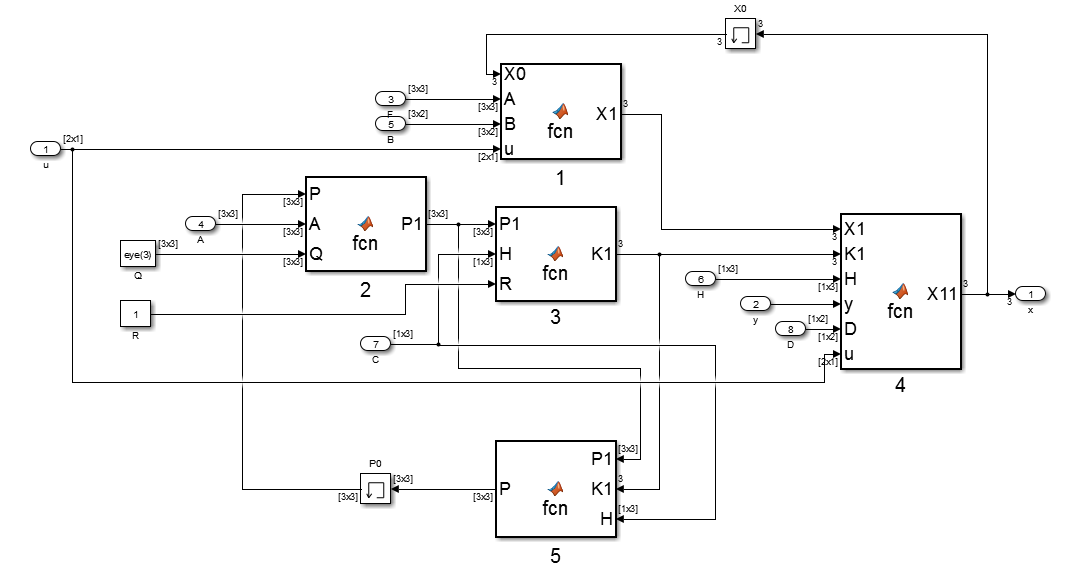
用5個function表達卡爾曼濾波算法其實比較繁瑣,但是可以更好地表達5個公式之間的時序關系,便于初學者理解。
模型整合及仿真工況設置
把上述兩部分內容組合起來就是整個基于擴展卡爾曼濾波的參數估計仿真模型,如下圖。基本思路就是,carsim模型輸出濾波算法所需的信號,然后進行參數估計,輸出估計的結果,最后將估計結果與車輛實際信號對比,來驗證算法的有效性。

為了驗證算法,還需要在carsim中設置一下仿真工況。
1)初始車速為30km/h進行滑行。

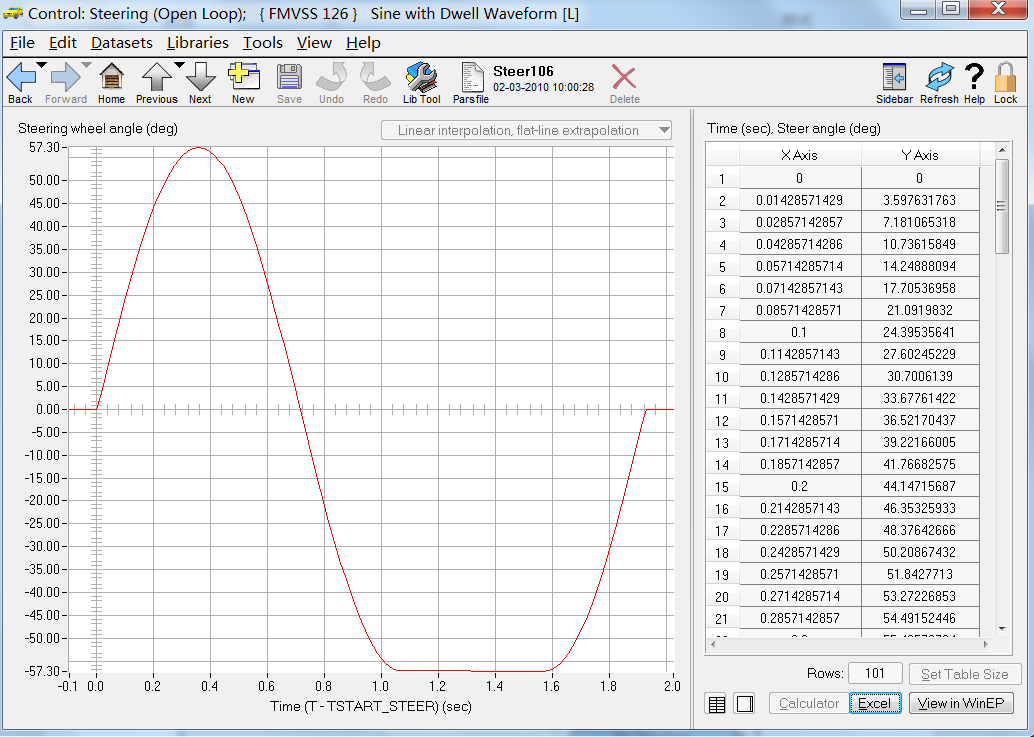
2)方向盤轉角按下圖的曲線執行。
仿真及結果分析
運行模型,得到估計的橫擺角速度、質心側偏角、縱向車速,與車輛實際的狀態對比如下圖。
橫擺角速度估計結果:

質心側偏角估計結果:

縱向車速估計結果:

從圖中可以看出,橫擺角速度、質心側偏角、縱向車速的估計值與實際值基本一致,算法可靠有效。
以上,介紹了擴展卡爾曼濾波算法進行參數估計的一個實例,僅供大家參考。





