

(圖:騰訊自動駕駛總經理蘇奎峰)
“騰訊將自動駕駛定義為以云平臺、模擬仿真和高精地圖為核心的基礎支撐平臺,用軟件和服務推動未來自動駕駛和智慧交通的發展。”
在WGDC 2021大會未來交通峰會上,騰訊自動駕駛總經理蘇奎峰詳解了騰訊自動駕駛業務的產業布局和發展理念。他認為,自動駕駛本身只是交通里的一項技術,是大樹和森林的關系,我們應當從整個智能交通規劃的宏觀視角去實現自動駕駛,而不要局限在汽車這個載體之上。

(圖:騰訊自動駕駛業務體系)
由數據驅動自動駕駛技術
自動駕駛是基于AI技術背景由數據驅動開發的鏈路,數據伴隨著整個發展過程,甚至整個車輛的生命周期。以特斯拉為例,它在運行的時候回傳數據,進行算法迭代和升級,即便是數據在用戶手里,依然可以迭代使用。
數據貫穿著研發、生產、測試、運營等生命周期,發揮著至關重要的作用,對數據進行高效收集和利用,提高數據循環鏈路的速度,是整個自動駕駛技術迭代的關鍵點。蘇奎峰認為,在未來交通里面,也許路測的采集、輔助車的采集將成為很好的數據來源。
2019年,騰訊與寶馬合作建設了國內首個自動駕駛私有云平臺,據了解目前這套平臺已經交付使用。而騰訊自身,也建設了針對于自動駕駛的開發與運營云平臺。今后,當自動駕駛汽車實現大規模部署,車端入口就能反饋大量用戶習慣以及車輛傳感器數據。這些數據可以上傳到云端,以數據平臺和虛擬仿真的服務,支撐自動駕駛系統升級。
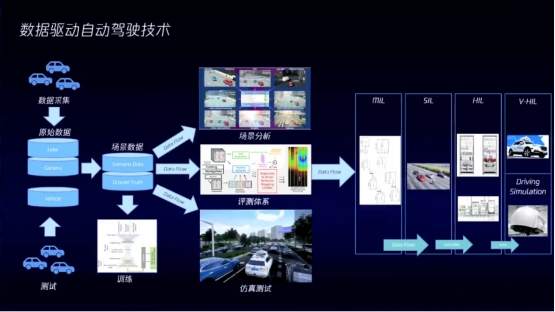
(圖:數據驅動自動駕駛技術)
描述只是構建數字孿生的第一步
蘇奎峰表示,騰訊自動駕駛淵源于地圖業務,尤其是三維街景業務,2016年成立自動駕駛實驗室并實現了開放道路的L4級自動駕駛測試發展到今天,騰訊形成了開發云、模擬仿真和高精地圖三大基礎平臺和自動駕駛核心技術套件。
而模擬仿真測試作為自動駕駛發展的核心支撐技術,自團隊成立初期就大力投入,且得益于騰訊在游戲、云、AI以及自動駕駛方面的技術積累,取得了顯著成果。
蘇奎峰認為,模擬仿真其實就是在構建一個數字孿生的三維虛擬世界,并生成各種環境要素。而今天我們看到的數字孿生大多只是對于物理世界的描述,這僅僅是實現數字孿生的第一步。下一步要實現的是孿生世界與物理世界的互動、推演甚至控制。騰訊將數字孿生體系的構建概括為四個階段,分別是精準的描述、實施的互動、模擬的推演、決策的控制。只有實現了四階段的閉環,才能更進一步的提升自動駕駛的服務能力。
高精地圖:鮮活比高精更重要
蘇奎峰指出,從某種意義上說,高精地圖的“鮮活”比精度更重要,自動駕駛需要更高精、實時的動態信息,數據更新非常重要,需要車端獲取大量數據用于構建高精地圖。
而無論是地圖的更新也好、模擬仿真也好,都要依賴于前端感知的技術。只有用更精細、更低成本的感知技術,才可以支撐我們實時獲取大量的數據,對物理世界做數字化。
騰訊目前已經做出了多種低成本的感知方案,其中包括毫米波雷達+視覺圖像融合的方案,也有僅依靠雷達的感知方案,已經可以實現在主干路和高速公路上無死角、低成本的更新和覆蓋。
為了實現高精地圖的鮮活,騰訊也會將車端傳感器的數據用于高精地圖的更新,從而形成一個數據閉環。在這樣的閉環體系中,算法、數據流的效率越高,成本越低,核心競爭力也會更強,這一點正在逐步成為自動駕駛行業的共識。

(圖:未來交通圖景)
最后,蘇奎峰表示,未來交通將會是人、車、路的融合一體,騰訊希望把三者完美的組織在一起,通過自身的核心支撐力與平臺,連接政府、連接每一個企業,甚至觸達每一個參與交通和出行的人。通過廣泛的連接以及對整個交通的全面觸達,利用騰訊的社交生態、內容生態、服務生態,把服務和基礎設施和人建立更緊密和智能的關系,助力建設未來交通的新模式。





